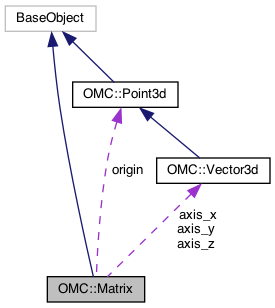
Provides a 3D transformation matrix (4x4).
|
|
| Matrix (const QVariant &var) |
| |
|
| Matrix (const QVariant &normal, const QVariant &origin) |
| |
|
OMC::Matrix * | matrix_rotation () const |
| | Returns rotation component of this matrix (3x3 block).
|
| |
|
virtual void | reset () |
| | Resets the matrix to the identity matrix.
|
| |
|
virtual void | normalize () |
| | Normalizes the matrix.
|
| |
|
virtual QVariant | apply (const QVariant &variant) |
| | Applies the matrix to the incoming variant type – returning the result.
|
| |
|
void | multiply (const OMC::Matrix *matrix) |
| | Compounds this matrix with m, same as = (*this) * m. The matrix object is modified in place.
|
| |
|
void | translate (const OMC::Vector3d *vector) |
| | Translates the local coordinate system represented by this tranformation matrix by the given vector. The matrix object is modified in place.
|
| |
|
virtual void | translate (double deltaX=0.0, double deltaY=0.0, double deltaZ=0.0) |
| | Translates the local coordinate system represented by this tranformation matrix by the given vector. The matrix object is modified in place.
|
| |
|
virtual void | scale (double scaleX=1.0, double scaleY=1.0, double scaleZ=1.0) |
| | Scales the local coordinate system represented by this tranformation matrix by the given factors. The matrix object is modified in place.
|
| |
|
void | rotate_radians (double rads, const OMC::Vector3d *vector) |
| | Rotates the local coordinate system represented by this tranformation matrix by the given angle (expressed in radian) around the given vector. The matrix object is modified in place.
|
| |
|
void | rotate_degrees (double degs, const OMC::Vector3d *vector) |
| | Rotates the local coordinate system represented by this tranformation matrix by the given angle (expressed in degree) around the given vector. The matrix object is modified in place.
|
| |
|
virtual void | skew (double skew) |
| | Skews the local coordinate system represented by this tranformation matrix by the given angle (expressed in degree). The matrix object is modified in place.
|
| |
|
void | orthogonal_project (double left, double right, double bottom, double top, double zNear, double zFar) |
| | Applies an orthogonal projection to the local coordinate system represented by this tranformation matrix. The matrix object is modified in place.
|
| |
|
void | perspective_project (double left, double right, double bottom, double top, double zNear, double zFar) |
| | Applies a perspective projection to the local coordinate system represented by this tranformation matrix. The matrix object is modified in place.
|
| |
|
void | perspective_project (double verticalFieldOfViewInDegrees, double widthOverHeightAspectRatio, double zNear, double zFar) |
| | Applies a perspective projection to the local coordinate system represented by this tranformation matrix. The matrix object is modified in place.
|
| |
|
void | look_at (const OMC::Point3d *eye, const OMC::Point3d *center, const OMC::Vector3d *upDirection) |
| | Replaces this by a lookAt matrix. The matrix object is modified in place.
|
| |
| QList< QVariant > | extract_parameters_2d (bool sxPos, bool syPos, OMC::Point2d *pivot) const |
| | Extracts the individual transformation parameters from the matrix. More...
|
| |
| QList< QVariant > | extract_parameters_3d (OMC::Point3d *pivot) const |
| | Extract 3d matrix parameters using 3d pivot value. More...
|
| |
|
virtual void | inverse () |
| | Inverse the current matrix.
|
| |
| OMC::Matrix * | get_inverse () |
| | Provides the inverted matrix and leaves the current one unaffected. More...
|
| |
|
virtual void | transpose () |
| | Transposes this matrix.
|
| |
|
virtual void | print (const QString &string) |
| | Prints the matrix' details to the application's stdout.
|
| |
|
|
bool | has_nan |
| | True if the matrix has a NaN in any value.
|
| |
|
bool | has_infinity |
| | True if the matrix has infinity in any value.
|
| |
|
OMC::Vector3d * | axis_x |
| | Get and set the x axis of the matrix.
|
| |
|
OMC::Vector3d * | axis_y |
| | Get and set the y axis of the matrix.
|
| |
|
OMC::Vector3d * | axis_z |
| | Get and set the z axis of the matrix.
|
| |
|
OMC::Point3d * | origin |
| | Get and set the origin of the matrix.
|
| |
|
bool | identity |
| | Get and set whether the matrix is an identity matrix. Setting to true will reset the matrix.
|
| |
|
bool | singular |
| | True if the matrix is singular.
|
| |
|
double | truck_factor |
| | The truck factor is a compensation factor due to the zooming of the camera. It is inherent to the transformations of a matrix.
|
| |
|
double | scale_factor |
| | The scale-factor inherent in the matrix.
|
| |
|
bool | rotation_exists |
| | True if this matrix has a rotation or shear component (2D or 3D). False otherwise, in which case the matrix can only have scaling, perspective and translation components.
|
| |
|
bool | constant_z |
| | True if transforming a constant Z plane yields another constant Z plane.
|
| |
|
bool | transform_2d |
| | True if this matrix can be converted to a 3x2 matrix representing a 2d transformation, false otherwise.
|
| |
|
bool | perspective |
| | True if any of the matrix's three projection terms are non-zero.
|
| |