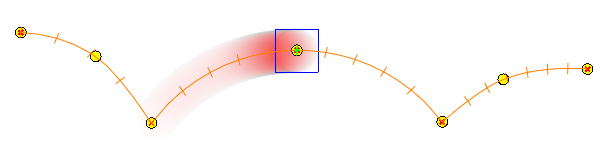
The Motion-Blur node allows you to generate a motion blur effect for animated elements in your scene.
The Motion-Blur node works by taking the position of the input element at the current frame as well as in previous frames. It then generates intermediary poses between each frame and combines the actual poses and the intermediary poses into a stack of “samples”. It then proceeds to lower the opacity of each sample, composite them together and add a directional blur between each sample.
The Motion-Blur node can work with standard transformations such as translations, rotations, scaling and skewing. It can be used on single elements, or on several elements simultaneously, whether composited together or separately.
Connection
The Motion-Blur node has an image (rightmost) input port and a motion (leftmost) input port. It takes the image sent to its image input port and outputs the motion-blurred image through its only output port.
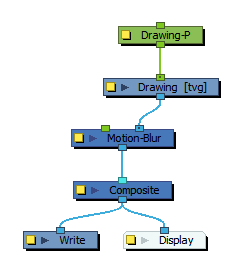
When nothing is connected to the motion input input port, the direction of the motion blur is based on the transformations done on the element connected to the image input port. This is the most simple usage scenario.
However, if the Motion-Blur node is connected to a composite node, the motion blur will be generated differently based on the composite’s mode:
-
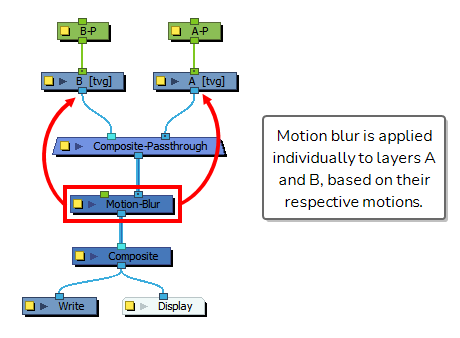
If the input image comes from a passthrough composite (wide cable), each input connected to the passthrough composite will have its own motion blur effect generated for it, using each input image’s own motion.
-
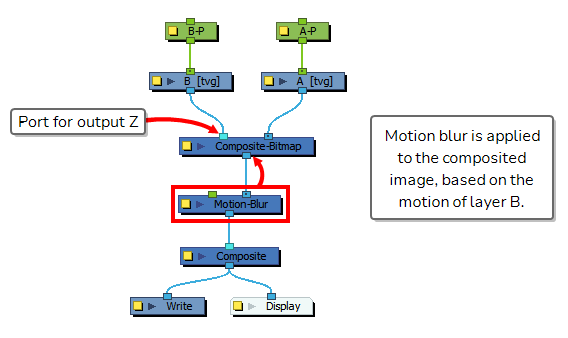
If the input image comes from a non-passthrough composite, the motion-blur will be applied to the composited output image as a whole. It will however only use the motion of the element connected to the composite’s Output Z port to generate the motion-blur effect. By default, a composite’s Output Z port is its leftmost input port.
It is also possible to use the motion of any other node in your scene to determine the direction of the motion-blur effect. To do this, connect this node to the Motion-Blur’s motion (leftmost) input port, like so:
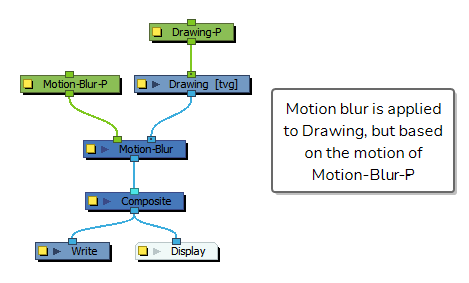
When a node is connected to the Motion-Blur node’s left input port, is uses the motion of this node, rather than the motion of the input image, but it still applies the blur to the input image.
Layer Properties
| Parameter | Description |
|---|---|
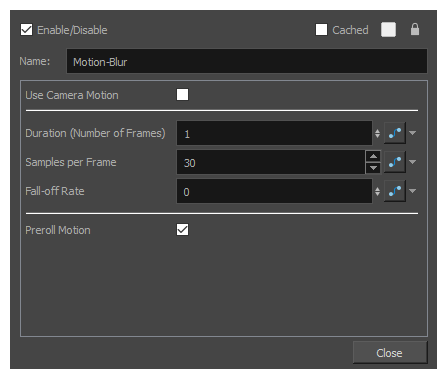
| Name | The name of the node as it appears in the Node View and the Timeline view. Each node must have a name that is unique to its containing group. |
| Use Camera Motion | When enabled, motion-blur is generated based on the motion of currently active camera. This option will override the transformation of the input image and the peg-port. |
| Duration (Number of Frames) |
The span of animation before and up to the current frame to use to generate the motion blur effect, in frames. For example, if this parameter is set to 3, the motion blur effect will be generated using the trajectory of the element starting from 2 frames before the current frame up to the current frame. NOTE This number can be a decimal value.
|
| Samples per Frame |
This parameter sets the amount of in-betweens to add to the blur effect between each frame of animation used. For example, if the Duration parameter is set to 3, setting this parameter to 1 will only use the position of the element in the current frame and the two previous frames to generate the motion blur. However, if this parameter is set to 2, the Motion-Blur node will generate one extra inbetween sample between each frame used to generate the motion blur, to simulate a smoother motion. |
| Fall-of Rate |
Defines the rate at which each trailing sample drops in weight and opacity as they get further and further from the position of the element in the current frame. This can be set to a decimal value between 0 and 1, where:
A value between 0 and 1 will result in a compromise between those two functions. |
| Preroll Motion | When enabled, samples are generated before the first frame of the scene, so that the motion blur effect is already in full effect when the scene begins. This can be useful in cases where the scene begins while the object is already in motion. |